









- Posts: 3
- Thank you received: 0
Solved PHD guiding problems with M-UNO
- PeterKom
- Topic Author
- Offline
- New Member
-

Less
More
19 Jan 2021 06:58 - 15 Feb 2021 16:25 #469
by PeterKom
PHD guiding problems with M-UNO was created by PeterKom
I bought my M-Uno in late November and duo to bad weather I was unable to test it in the filed until 2 weeks ago when the weather got better.
My first problem was to get pass PHD calibration. I always got an error with Star not moving enough.
We got pass that as Stefano send me a Beta StarGO version which solved this issue.
Now I have problem with guiding. My DEC always show a strange 20s oscillation with every filter I tried (LowPass 2, Z-filter, ...)
Here is the PHD log from yesterday
openphdguiding.org/logs/dl/PHD2_logs_aS6s.zip
I have posted the issue also on Cloudynights starting at page 10 of following link!
www.cloudynights.com/topic/614135-avalon...age-12#entry10815921
There was a lot of response but at the end they suspect it could be a FTDI chip problem or firmware issue who are holding up the commands in PHD!
And yes all programs being installed and run as Admin!
All cables checked and none is pulling. Balance is fine,....
Can you please check and respond.
BR Peter
My first problem was to get pass PHD calibration. I always got an error with Star not moving enough.
We got pass that as Stefano send me a Beta StarGO version which solved this issue.
Now I have problem with guiding. My DEC always show a strange 20s oscillation with every filter I tried (LowPass 2, Z-filter, ...)
Here is the PHD log from yesterday
openphdguiding.org/logs/dl/PHD2_logs_aS6s.zip
I have posted the issue also on Cloudynights starting at page 10 of following link!
www.cloudynights.com/topic/614135-avalon...age-12#entry10815921
There was a lot of response but at the end they suspect it could be a FTDI chip problem or firmware issue who are holding up the commands in PHD!
And yes all programs being installed and run as Admin!
All cables checked and none is pulling. Balance is fine,....
Can you please check and respond.
BR Peter
Last edit: 15 Feb 2021 16:25 by Stefano82.
Please Log in or Create an account to join the conversation.
- ken.self
-

- Offline
- Junior Member
-

Less
More
- Posts: 27
- Thank you received: 3
21 Jan 2021 23:22 #470
by ken.self
-- Ken
Avalon M-Uno; GSO RC8; ASI1600; Optec focuser; Aaeon UP/Ubuntu/INDI
Replied by ken.self on topic PHD guiding problems with M-UNO
As one of the folks at Cloudy Nights trying to help out Peter we went through his guide logs to see if we could understand what was happening.
In the log he attached, run #3 is a 53 minute unguided run using the guiding assistant. That looks totally normal for an Avalon although the RA drift looks larger than usual. This could be due to an imperfect calibration.
Run #4 is a calibration and is where things begin to look strange. Peter appears to have set guide rates in Stargo of 0.35x in RA and 0.4x in Declination.
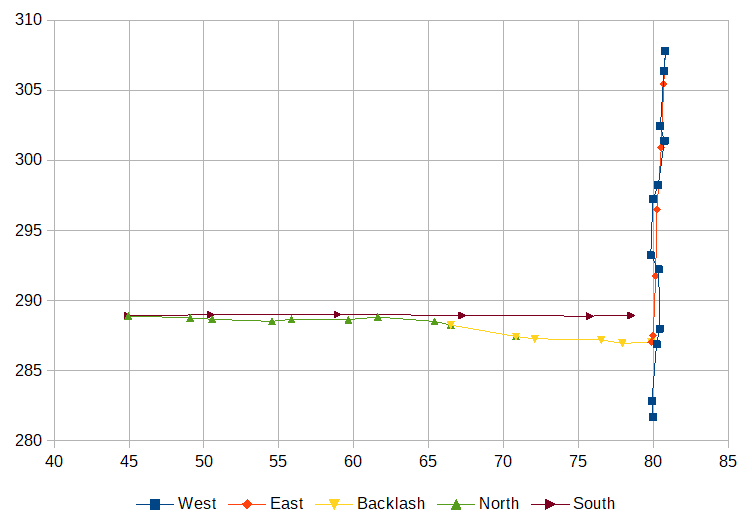
The attached graph shows the raw calibration movements in pixels.
The west leg shows erratic guide pulse movements. Short ones in between longer ones. However it is straight.
The east leg has evenly spaced guide movements and returns along the same path but stops short of the start position. The pulses on this leg are longer due to the fast return option being used. 2500ms pulses vs 1150ms on the west leg.
There is a bit of backlash correction but that appears to be an artefact of the dec movement.
The north leg shows the same erratic pulse lengths as the west leg. I think PHD2 interprets the short movement as backlash. The north leg is orthogonal to the east/west leg
The south leg is similar to the east leg and has evenly spaced pulses - also longer than the north pulses: 2500ms vs 1150
After calibration the guide rates based on the calibration results come out at 6.9 as/s RA (0.46x) and 8.1 as/s in DEC (0.54x). This can be due to an incorrect focal elngth specified but it it also affected by the unevenly spaced pulses west and north.
Overall the calibration looks reasonably good.
The issues start when guiding commences e.g run #5. RA guiding looks good. But dec starts out with a small 5s oscillation that finally settles to a large (10 arcse peak to peak) oscillation ith 10s period. This is using the LowPass2 algorithm with 90% aggression.
In an earlier session, Peter was using the Z-filter algorithm and got a similar Dec oscillation with a period of 20s. I think this is because the Z-filter was less aggressive with its corrections. But that indicates that it is not a guiding algorithm issue. And in any case there are many Avalon users using both LowPass2 and Z-filter algorithms successfully.
Looking in the Debug log, whenever a guide pulse is issued, PHD2 asks for a IsGuiding status and most of the time a 0 (not guiding) is returned even before the pulse should have finished. It does occasionally return IsGuiding = 1 (guiding in progress) but that is often when the pulse should have finished.
This is definitely a strange problem. As best as we can figure out, it may be due to the guide commands being delayed along the communications chain and being applied out of phase. But it only seems to affect the Dec axis. It could also be electromechanical.
In the log he attached, run #3 is a 53 minute unguided run using the guiding assistant. That looks totally normal for an Avalon although the RA drift looks larger than usual. This could be due to an imperfect calibration.
Run #4 is a calibration and is where things begin to look strange. Peter appears to have set guide rates in Stargo of 0.35x in RA and 0.4x in Declination.
The attached graph shows the raw calibration movements in pixels.
The west leg shows erratic guide pulse movements. Short ones in between longer ones. However it is straight.
The east leg has evenly spaced guide movements and returns along the same path but stops short of the start position. The pulses on this leg are longer due to the fast return option being used. 2500ms pulses vs 1150ms on the west leg.
There is a bit of backlash correction but that appears to be an artefact of the dec movement.
The north leg shows the same erratic pulse lengths as the west leg. I think PHD2 interprets the short movement as backlash. The north leg is orthogonal to the east/west leg
The south leg is similar to the east leg and has evenly spaced pulses - also longer than the north pulses: 2500ms vs 1150
After calibration the guide rates based on the calibration results come out at 6.9 as/s RA (0.46x) and 8.1 as/s in DEC (0.54x). This can be due to an incorrect focal elngth specified but it it also affected by the unevenly spaced pulses west and north.
Overall the calibration looks reasonably good.
The issues start when guiding commences e.g run #5. RA guiding looks good. But dec starts out with a small 5s oscillation that finally settles to a large (10 arcse peak to peak) oscillation ith 10s period. This is using the LowPass2 algorithm with 90% aggression.
In an earlier session, Peter was using the Z-filter algorithm and got a similar Dec oscillation with a period of 20s. I think this is because the Z-filter was less aggressive with its corrections. But that indicates that it is not a guiding algorithm issue. And in any case there are many Avalon users using both LowPass2 and Z-filter algorithms successfully.
Looking in the Debug log, whenever a guide pulse is issued, PHD2 asks for a IsGuiding status and most of the time a 0 (not guiding) is returned even before the pulse should have finished. It does occasionally return IsGuiding = 1 (guiding in progress) but that is often when the pulse should have finished.
This is definitely a strange problem. As best as we can figure out, it may be due to the guide commands being delayed along the communications chain and being applied out of phase. But it only seems to affect the Dec axis. It could also be electromechanical.
-- Ken
Avalon M-Uno; GSO RC8; ASI1600; Optec focuser; Aaeon UP/Ubuntu/INDI
Attachments:
Please Log in or Create an account to join the conversation.
- PeterKom
- Topic Author
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 0
28 Jan 2021 12:40 #474
by PeterKom
Replied by PeterKom on topic PHD guiding problems with M-UNO
Dear Avalon Team,
Have you checked the post from Ken.
I have done no realy progress in PHD with some further testing.
The results are still not usable for imaging.
It is also hard to say what is wrong becasue I use the Beta version of the StarGo software and frimware and other users don't.
BR
Peter
Have you checked the post from Ken.
I have done no realy progress in PHD with some further testing.
The results are still not usable for imaging.
It is also hard to say what is wrong becasue I use the Beta version of the StarGo software and frimware and other users don't.
BR
Peter
Please Log in or Create an account to join the conversation.
- PeterKom
- Topic Author
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 0
08 Feb 2021 19:59 #482
by PeterKom
Replied by PeterKom on topic PHD guiding problems with M-UNO
Avalon has send me beta Software "Install_StarGo_651_B2" which seams to have fixed the issue with guiding. In the originaly supplied version "Install_StarGo_640_SP2" there was a bug.
If anybody gets a similar problem (PHD guiding problem) with his new M-UNO mount please please contact Avalon support as it might be a software issue.
BR Peter
If anybody gets a similar problem (PHD guiding problem) with his new M-UNO mount please please contact Avalon support as it might be a software issue.
BR Peter
Please Log in or Create an account to join the conversation.