









- Posts: 15
- Thank you received: 8
Solved M-Uno fitted with TDM, ready for precise unguided imaging!
- wsuyker
- Topic Author
- Offline
- New Member
-

Less
More
16 Aug 2020 11:23 - 16 Aug 2020 11:35 #379
by wsuyker
Drivemaster TDM adapter for M-Uno was created by wsuyker
Hi,
It would be great to add the possibility of unguided imaging to my M-Uno. The Drivemaster TDM (www.bresser.de/en/Astronomy/EXPLORE-SCIE...M-Tracking-unit.html) appears to offer the required precision and compatibility (LX200/ST4 compatibility). Overall RMS precision could reach <0.5". I contacted the inventortor to check my understanding, which he confirmed provided that a solid mounting on the polar axis can be achieved. A range of off-the-shelve adapters are offered, but none for the M-Uno. Therefore, I have decided to embark upon designing one and having it machined.
The best mounting can be achieved by replacing the original retaining ring that secures the lower polar axis ball bearing inside the polar house (see enclosed photo where I have unscrewed this retaining ring). After having taken all measurements to make a drawing for a new retaining ring that can also hold the TDM stator, I would like to ask Avalon-Instruments confirmation that:
- the thread on this adapter that screws into the polar house is indeed M64x1.0
- the thread inside the polar axis (for the Celestron AVX polar scope) is M28x1.0
Thank you in advance. I will try to update this post as work progresses.
Willem

It would be great to add the possibility of unguided imaging to my M-Uno. The Drivemaster TDM (www.bresser.de/en/Astronomy/EXPLORE-SCIE...M-Tracking-unit.html) appears to offer the required precision and compatibility (LX200/ST4 compatibility). Overall RMS precision could reach <0.5". I contacted the inventortor to check my understanding, which he confirmed provided that a solid mounting on the polar axis can be achieved. A range of off-the-shelve adapters are offered, but none for the M-Uno. Therefore, I have decided to embark upon designing one and having it machined.
The best mounting can be achieved by replacing the original retaining ring that secures the lower polar axis ball bearing inside the polar house (see enclosed photo where I have unscrewed this retaining ring). After having taken all measurements to make a drawing for a new retaining ring that can also hold the TDM stator, I would like to ask Avalon-Instruments confirmation that:
- the thread on this adapter that screws into the polar house is indeed M64x1.0
- the thread inside the polar axis (for the Celestron AVX polar scope) is M28x1.0
Thank you in advance. I will try to update this post as work progresses.
Willem
Attachments:
Last edit: 16 Aug 2020 11:35 by wsuyker.
The following user(s) said Thank You: jimv
Please Log in or Create an account to join the conversation.
- Stefano82
-

- Offline
- Administrator
-

- Don't panic
25 Aug 2020 11:41 - 26 Aug 2020 10:30 #390
by Stefano82
Stefano
Avalon Instruments Team
Replied by Stefano82 on topic Drivemaster TDM adapter for M-Uno
Hi Willem
I confirm you that the thread on the polar finder house is M64x1.0 and that the thread inside the polar axis is M28x1.0.
Best regards
I confirm you that the thread on the polar finder house is M64x1.0 and that the thread inside the polar axis is M28x1.0.
Best regards
Stefano
Avalon Instruments Team
Last edit: 26 Aug 2020 10:30 by Stefano82.
Please Log in or Create an account to join the conversation.
- wsuyker
- Topic Author
- Offline
- New Member
-
Less
More
- Posts: 15
- Thank you received: 8
22 Jan 2021 17:27 - 09 Mar 2021 12:17 #471
by wsuyker
Replied by wsuyker on topic M-Uno fitted with TDM, ready for precise unguided imaging!
I am pleased to share the successful addition of a TDM drivemaster to my M-Uno. The inventor of the TDM, Attila Madai, helped me to realise the required parts.

As shown in the pictures, an aluminium custom ring replaces the original Avalon retaining ring shown in my previous post above. The RA axis is extended by screwing a stainless steel shaft into the existing RA polar scope thread.

The high precision encoder is added onto this shaft and securely fastened to the aluminium adapter.

A cap ensures protection.

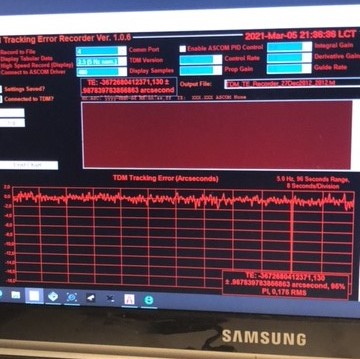
The system works like a treat. Setting the dipswithtches to 5Hz corrections and tracking rate 0.45, the system typically reaches a +/- tracking error <0.75" during 95% of time, realising an RMS <0.14" fully loaded with a C11 (ca. 15 kg including accessoires). Shown is a PC readout of the tracking corrections (daylight setup in my living room)
In practice, after switching on the TDM it works fully transparently when software operated. Goto's to objects from within planetarium software like the SkyX and SkySafari or sequence software like N.I.N.A. work flawlessly. Slews override the TDM; after reaching the target, the TDM picks up it's precise corrections again and 'locks' the mount in guiding speed. There is one little peculiarity: the TDM actively uses the ST4 port which locks the mount into guiding speed. This prevents manual slews from the handcontroller. The Avalon firmware/ Ascom driver offers a solution: the ST4 port can be manually disabled by unchecking a box, freeing up the mount if desired. Practically, I never use the handbox.
Note: should there be interest in adding the TDM by others, please let me know. The adapters are quite straightforward to produce now the dimensions are known. Avalon might be willing to manufacture them in matching red")
As shown in the pictures, an aluminium custom ring replaces the original Avalon retaining ring shown in my previous post above. The RA axis is extended by screwing a stainless steel shaft into the existing RA polar scope thread.
The high precision encoder is added onto this shaft and securely fastened to the aluminium adapter.
A cap ensures protection.
The system works like a treat. Setting the dipswithtches to 5Hz corrections and tracking rate 0.45, the system typically reaches a +/- tracking error <0.75" during 95% of time, realising an RMS <0.14" fully loaded with a C11 (ca. 15 kg including accessoires). Shown is a PC readout of the tracking corrections (daylight setup in my living room)
In practice, after switching on the TDM it works fully transparently when software operated. Goto's to objects from within planetarium software like the SkyX and SkySafari or sequence software like N.I.N.A. work flawlessly. Slews override the TDM; after reaching the target, the TDM picks up it's precise corrections again and 'locks' the mount in guiding speed. There is one little peculiarity: the TDM actively uses the ST4 port which locks the mount into guiding speed. This prevents manual slews from the handcontroller. The Avalon firmware/ Ascom driver offers a solution: the ST4 port can be manually disabled by unchecking a box, freeing up the mount if desired. Practically, I never use the handbox.
Note: should there be interest in adding the TDM by others, please let me know. The adapters are quite straightforward to produce now the dimensions are known. Avalon might be willing to manufacture them in matching red
Attachments:
Last edit: 09 Mar 2021 12:17 by wsuyker. Reason: modified based on most recent experience
The following user(s) said Thank You: schmeah@aol.com, ken.self, Crescent, jimv, Olivier31, Manitu
Please Log in or Create an account to join the conversation.
- schmeah@aol.com
- Offline
- New Member
-
Less
More
- Posts: 1
- Thank you received: 0
08 Mar 2021 03:35 #502
by schmeah@aol.com
Replied by schmeah@aol.com on topic M-Uno fitted with TDM, ready for precise unguided imaging!
This is exciting. I had been inquiring some time ago about the feasibility of using the TDM with the M Uno, primarily as a potential solution to the considerable RA drift which I have experienced which causes me to lose a guide star during transient periods of cloud cover. I would be very interested to adapt my mount in such a a way.
Please Log in or Create an account to join the conversation.
- wsuyker
- Topic Author
- Offline
- New Member
-
Less
More
- Posts: 15
- Thank you received: 8
09 Mar 2021 12:29 - 09 Mar 2021 15:44 #505
by wsuyker
Replied by wsuyker on topic M-Uno fitted with TDM, ready for precise unguided imaging!
Yes, a high precision encoder is a very logical upgrade for the beautiful Avalon technology. As evidenced by the new Avalon M Due. Enclosed is a picture of last Friday's unguided imaging session, which was a bit windy. The downward spike represents dithering. The TDM allows guiding input if desired (ST4), for example for small atmosferic corrections during especially long exposures.
Attachments:
Last edit: 09 Mar 2021 15:44 by wsuyker.
The following user(s) said Thank You: Crescent
Please Log in or Create an account to join the conversation.