









- Posts: 27
- Thank you received: 5
Question M-Zero OBS Motorized Polar Alignment Controller
- G_Gagnon
- Topic Author
- Offline
- Junior Member
-

Less
More
09 Jan 2022 23:54 - 10 Jan 2022 01:10 #849
by G_Gagnon
M-Zero OBS Motorized Polar Alignment Controller was created by G_Gagnon
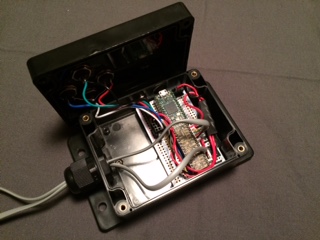
The weather here being lousy and being upgrading my remote observatory roof, I have taken this time to build a stand alone controller for the Motorized Polar Alignment of the M-Zero OBS. It consists of a Teensy micro-controller, TMC2209 stepper motor controllers, four buttons (Latitude up and down, Azimuth East and West), and runs Arduino code using the AccelStepper library. It works great and will come handy in the field whenever I bring my mount to remote locations.
If/when I get to it, I would like to control it from a Python script, feeding it the correction values obtained from the Polar Alignment Assistant of the KStars/Ekos/Indilib software.
Let me know if it interests anyone of you and I will provide more info.

If/when I get to it, I would like to control it from a Python script, feeding it the correction values obtained from the Polar Alignment Assistant of the KStars/Ekos/Indilib software.
Let me know if it interests anyone of you and I will provide more info.
Last edit: 10 Jan 2022 01:10 by G_Gagnon. Reason: Added pictures
Please Log in or Create an account to join the conversation.